
De Zhongtang-brug op de snelweg xx heeft een hoofdoverspanning van 32,5 + 4 x 45 + 32,5 m en een doorlopende kokerligger van voorgespannen gewapend beton met gelijke doorsnede (naspanmethode), met een totale lengte van 245,9 m. De kokerligger is een enkele kamer, de balkhoogte in het midden is 308,25 cm, de dakbreedte is 1100 cm (de breedte van het brugdek is 12 m) en de breedte van de bodemplaat is 480 cm. Het web is hellend en de middenafstand bij de bovenplaat is 570 cm. De balkuiteinden en het midden van de gehele balk zijn voorzien van balken en de rest is voorzien van membranen om de 15 meter.
De pijlerfundering van de hoofdbrug bestaat uit 4 ter plaatse geboorde palen met een diameter van 120 cm, die ruim 50 cm in het gesteente zijn verankerd. Het pierlichaam heeft een dubbelkolomsstructuur van gewapend beton met een diameter van 180 cm.
Wanneer de brug wordt opgericht, wordt de SSY-methode toegepast, dat wil zeggen dat er een meerpuntsduwmethode wordt gebruikt om de balk op te richten. De kenmerken van deze methode zijn: de horizontale reactiekracht bij het duwen (trekken) van het balklichaam wordt verspreid en werkt op elke pijler, en het duwen (trekken) kan centraal worden geregeld. Omdat er tijdens de werkzaamheden geen tijdelijke pijlers aanwezig zijn, is de voorkant van de kokerligger als geleidingsbalk verbonden met een 30 meter lange stalen spant.
Wanneer de geprefabriceerde kokerbalk omhoog wordt geduwd, wordt dit in een cyclus uitgevoerd volgens de procedures van voortbewegen → hijsbalk → valbalk → voortstuwing. Figuur 1 toont het geval van een cyclus.
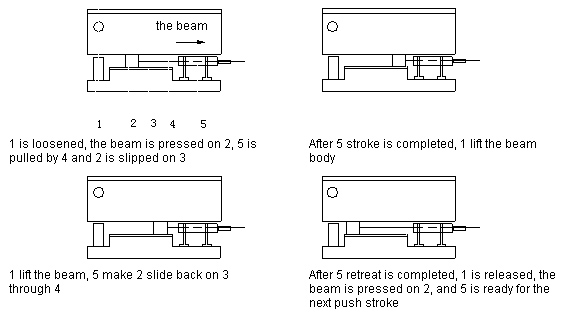
Diagram van de push-upprocedure
1 —— Verticale cilinder;2——Sleep hoofd;3——Sweg;4——Pulling Rod;5——Hhorizontale cilinder
Het is te zien dat om deze programmacyclus te realiseren, de horizontale cilinder de actie voltooit van het duwen van de kokerbalk door de schuifinrichting, en de verticale cilinder de actie voltooit van het optillen en laten vallen van de balk. Dat wil zeggen dat de horizontale cilinder en de verticale cilinder afwisselend werken.

1. Hydraulisch systeem van meerpunts duwbalk en de bediening ervan
Zowel de horizontale cilinder als de verticale cilinder worden hydraulisch aangedreven en elektrisch bestuurd. De totale lengte van de kokerligger die voor de brug moet worden geduwd, bedraagt 225 meter, en elke strekkende meter weegt 16,8 ton, met een totaalgewicht van ongeveer 3770 ton. Daarom zijn er in totaal 10 horizontale cilinders en 24 verticale cilinders (de oliedruk is 320 kg/cm2 en het vermogen is 250 ton) opgesteld. Er zijn 5 pijlers met horizontale cilinders, 2 voor elke pijler; er zijn 6 pijlers voor verticale cilinders, 4 voor elke pijler.
De verticale krik voltooit het heffen en neerlaten van de balk. Tijdens het bouwproces hoeft niet de hele brug te worden gesynchroniseerd en moeten de pijlers worden verdeeld, dus er is geen probleem van gecentraliseerde controle. De elektrische bediening kan het continu heffen of laten zakken van de krik voltooien, en kan ook het jogformulier voltooien.
De horizontale vijzel voltooit de balkduwende actie. Het bouwproces vereist dat de hele brug synchroon is, dat wil zeggen tegelijkertijd moet worden uitgevoerd of gestopt, dus wordt de gecentraliseerde besturing van de horizontale krik opgezet en wordt voor dit doel een elektrische schakelkast met gecentraliseerde besturing opgezet.
Het gebruik van horizontale vijzels en verticale vijzels neemt geleidelijk toe en de kokerbalk wordt 15 meter per cyclus geprefabriceerd. Met de voortdurende groei van de kokerbalk neemt het aantal gebruikte vijzels geleidelijk toe. In de laatste paar prefabricagecycli zijn alle 10 sets horizontale vijzels en 24 verticale vijzels gebruikt.
Om elke pier met de centrale controlekamer te verbinden, installeerden we een intercomgeluidsoverdrachtsysteem. De praktijk heeft uitgewezen dat het hierboven genoemde hydraulische transmissiesysteem en de besturingsmethoden betrouwbaar in gebruik zijn.
Laten we het ter referentie hebben over enkele ervaringen met verschillende problemen met de hydraulische transmissie van de duwframebalkmethode.
1. Het probleem van de trapsgewijze drukregeling van het hydraulische systeem. Het probleem van stapsgewijze drukregeling wordt naar voren gebracht vanwege de verschillende overwegingen van statische wrijvingsweerstand en dynamische wrijvingsweerstand wanneer de kokerbalk beweegt. In het verleden werd altijd aangenomen dat het hydraulische systeem twee of drie oliedrukken zou moeten hebben: wanneer de statische wrijvingsweerstand wordt overwonnen, wordt een grotere oliedruk gebruikt; en er wordt een kleinere oliedruk gebruikt wanneer de kokerbalk schuift. De methode is om het hydraulische systeem te veranderen door de verschillende ingestelde overdrukkleppen aan te sluiten. Op deze manier zijn het hydraulische systeem en de besturing ervan iets ingewikkelder. Onze praktijk heeft bewezen dat de oliedruk van het hydraulische systeem niet afhankelijk is van zichzelf, maar van de externe weerstand van de krik. Dat wil zeggen dat wanneer het hydraulische systeem in werking is, de oliedruk niet wordt bepaald door de hoeveelheid op het typeplaatje van de oliepomp, maar door de totale weerstand die wordt ondervonden tijdens het terugstromen van de olie naar de olietank nadat deze de pomp heeft verlaten. . Als de vijzel geen weerstand (belasting) heeft, wordt de druk van de oliepomp alleen bepaald door de weerstand van de pijpleiding; als de olie uit de oliepomp onmiddellijk in de atmosfeer of de olietank terechtkomt, zal de druk van de oliepomp nul zijn; als de weerstand (belasting) R van de krik toeneemt, neemt ook de druk van de oliepomp toe. Wanneer de krik gelost is, wordt de druk van de oliepomp bepaald door de eenrichtingsklep; wanneer de krik belast is, wordt de druk van de oliepomp, dat wil zeggen de oliedruk van het systeem, bepaald door de weerstand van de krik. De oliedruk op het werk wordt bepaald door de krikbelasting. Dat wil zeggen dat de oliedruk van het hydraulisch systeem zichzelf zal veranderen met de externe weerstand, waardoor de stapsgewijze drukregeling niet nodig is.

2. Synchronisatieprobleem van horizontale aansluitingen. Het duwproces vereist dat de linker en rechter horizontale vijzels de balk met dezelfde snelheid naar voren moeten duwen, anders zal de balk worden afgebogen als deze wegglijdt. Het eerste waar mensen natuurlijk aan denken is dat de kracht die door de linker en rechter horizontale vijzels op het balklichaam wordt uitgeoefend gelijk moet zijn, wat correct is. Wanneer de linker- en rechtersymmetrie van het balklichaam uitstekend is en de weerstand links en rechts gelijk is, moet de kracht die wordt uitgeoefend door de linker en rechter horizontale vijzels natuurlijk ook gelijk zijn. De tweede overweging is dat de linker- en rechtervoorwaartse snelheid ook gelijk moeten zijn. Op deze manier kan de straal soepel en recht lopen. Het is echter moeilijk voor het balklichaam om ervoor te zorgen dat elke sectie links en rechts perfect symmetrisch moet zijn en dat de weerstand links en rechts gelijk moet zijn. De oliedruk gerelateerd aan het hierboven genoemde systeem wordt bepaald door externe weerstand. Je kunt je voorstellen dat de linker en rechter vijzels onder verschillende oliedrukomstandigheden moeten werken, dus zal de snelheid van de linker en rechter vijzels op dit moment worden gesynchroniseerd? Ter illustratie wordt aangenomen dat slechts één paar vijzels van één pijler werkt. Omdat we één pomp met één vijzel hebben ingesteld, lost dit het probleem van de snelheidssynchronisatie heel goed op. Omdat de oliepomp die we gebruiken een kwantitatieve verdringerpomp is, is het debiet in theorie, ongeacht hoeveel weerstand de olieproductie door de oliepomp ondervindt (dat wil zeggen, hoe hoog de oliedruk van het systeem ook is), onveranderd. Daarom moeten de linker- en rechteraansluitingen worden gesynchroniseerd. Deze conclusie kan uiteraard ook worden afgeleid uit de situatie van twee pijlers met vier toppen, drie pijlers met zes toppen, vier pijlers met acht toppen, of vijf pijlers met tien toppen. Daarom kan onze methode van één pomp en één bovenkant het probleem van linker- en rechtersynchronisatie beter realiseren. De praktijk heeft ook uitgewezen dat bij de duwbalk de hartlijn van de kokerbalk in principe niet verschoven is (strikt gesproken zou hij van links naar rechts enigszins verschoven moeten zijn, maar hij kan altijd binnen een bepaald bereik gehouden worden). Het bouwproces vereist nauwlettend toezicht op de afwijking van de middellijn. Als deze groter is dan 2 cm, moet deze worden gecorrigeerd (met zijdelingse geleiding). Tijdens het push-upproces is het aantal correcties erg klein. Slechts één of twee keer in dertig duwbewegingen (een kokerbalk van 15 meter). Dit kan worden beschouwd als het gecombineerde resultaat van vele objectieve factoren, want wat hydraulische machines betreft, heeft de oliepomp een stromingsfout, heeft de krik interne lekkageproblemen (elke vijzel is anders en de zuiger kan zich in verschillende posities bevinden ), en het systeem Lekkage van andere apparaten binnenin, enz., wat niet in tegenspraak is met onze conclusie hierboven.
3. Synchronisatieprobleem van verticale aansluitingen. Onze verticale vijzels werken door een pomp met vier vijzels, en er moet een synchronisatieklep worden geplaatst, omdat de synchronisatieklep (of wisselklep) ervoor kan zorgen dat meerdere vijzels onder verschillende belastingen (weerstand) toch een vooraf bepaalde verhouding of een gelijke olietoevoer verkrijgen. synchronisatie. Maar aangezien een synchronisatieklep slechts twee uitgangen heeft. Om de structuur van het systeem te vereenvoudigen, is er geen synchronisatieklep geïnstalleerd. Aangezien de linker- en rechtergewichten van de kokerbalk symmetrisch zijn, is dit geen groot probleem. De praktijk heeft uitgewezen dat de schatting klopt, de verticale vijzel stijgt en daalt in principe synchroon en er is geen probleem bij het heffen en dalen van de balk.
Posttijd: 16 mei 2022